Sections

Visorbot(with fully rotational servo mods)2001
Visorbot is a robot that I designed and built in 2001. It consists of a Handspring Visor Deluxe pda and a Pontech SV203 servo controller, using two fully rotational servos controlling two independently controlled wheels. Infrared sensors are used for object detection, but the primary source of input is a plug-in color camera for the Visor.
Long-Exposure Webcam Modifications2002-2003


Description of Logitech Quickcam Pro 3000 long-exposure modification Description of Philips Vesta 675 long-exposure modification Long-exposure modified Watec LCL-802H (not a webcam - type ½ very sensitive monochrome CCD) During my foray into astrophotography (which also involved major software projects such as Keith's Image Stacker and Keith's AstroImager), I ventured into the seedy underworld of astrophotography webcam hackers, folks who modify webcams to enable long exposures. In their factory configuration, webcams are intended for video and instantaneous snapshots. Consequently, they cannot expose their sensors for longer than their slowest possible video frame-rate, 5fps across all makes and models at the time this hobby was popular in the mid2000s. These hacks involve solder modifications on the webcam circuit-boards and coresponding changes to control hardware and software. They are particularly difficult mods owing to the smaller-than-average component and trace size, and component spacing, intrinsic to webcams.
Electro-Etcher/Plater/Marker2013
Proceed to electro-etcher/plater/marker page Electro-etching, -plating, and -marking have seen a resurgence in recent decades. These three methods use, respectively, DC+, DC-, and AC voltage to drive electrochemical redox reactions between metallic anodes and cathodes in an electrolytic solution. The etching process is generally much safer than classical acid-based methods of etching, and it also enables plating and marking which are whole new methods of working with metal.
Wide-angle lens mod for FPV UAV2016As of the end of 2016, the Hubsan H111D quadcopter (aka, unmanned aerial vehicle (UAV) or drone) is arguably the smallest such device that transmits a 5.8Ghz video signal. I purchased one with the intent to create a closed loop system that would enable video processing on a computer as well as control feedback from the computer, i.e., to use ground-based computer vision processing to experiment on UAV autonomous flight and other behavior. However, the camera and lens that come stock with the H111D provide a very narrow field of view (FOV). This makes the UAV practically impossible to fly from a first-person view (FPV) perspective and would similarly hamper my attempts at autonomous behavior (how easily could you navigate through the world if you had to look through a long thin tube?). A number of people have already documented a mod that replaces the lens of the camera with one that provides a wider FOV. I similarly documented my efforts and have included the video above.
Camera gimble2017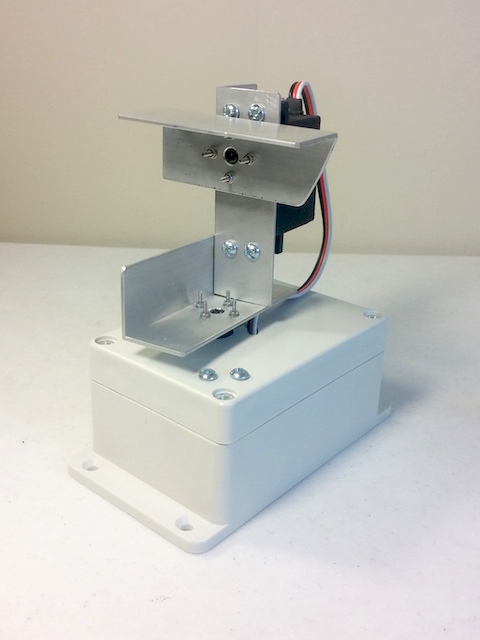
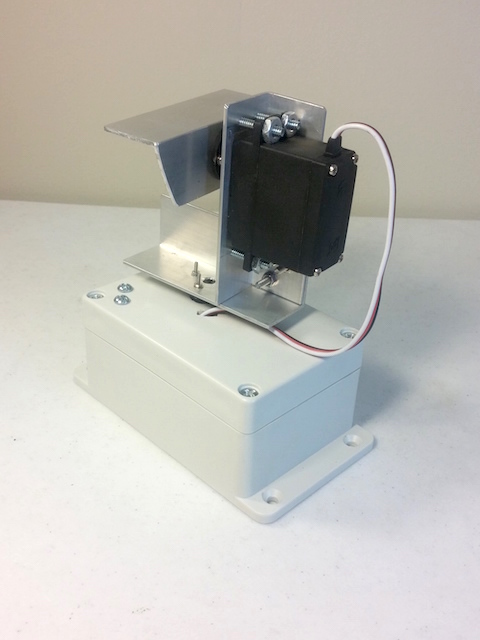
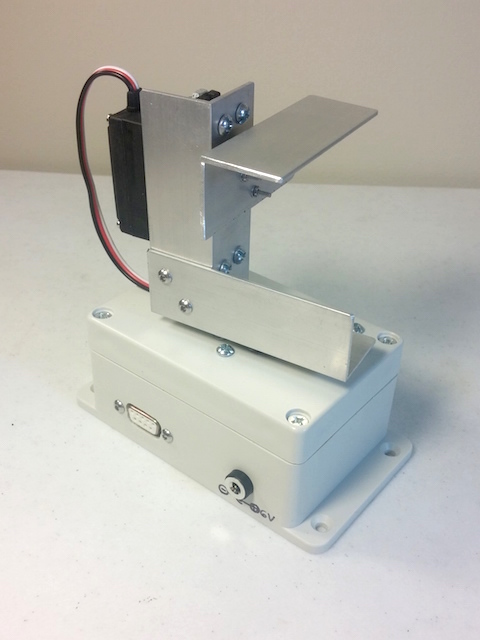
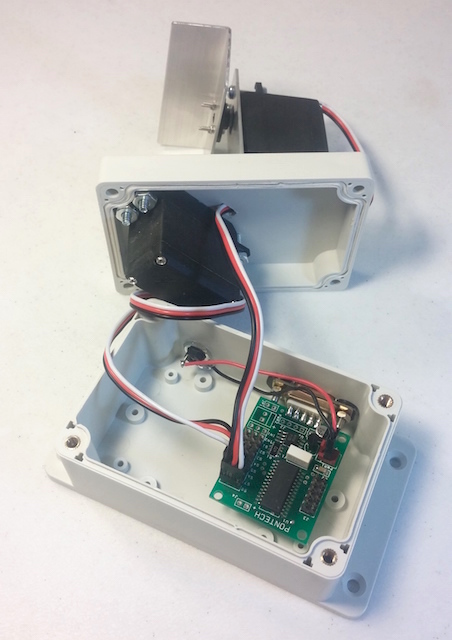
At a previous job, our team had a few work-from-home folks who would regularly join meetings by Skype. I thought it would be neat to put their webcam on a gimble and then give the remote viewer control of the gimble so they could look around the room as they saw fit. Here's the altitude-azimuth gimble I built from two servos, some aluminum angle (like angle "iron"), a Pontech SV203 servo controller, and a project box. The SV203 supports not only out-bound servo control (in addition to out-bound high/low voltage control), but also in-bound voltage reading for sensors, so I had the idea that this project could be extended with a directional microphone, sonar, etc. that would then enable the gimble to automatically orient toward the speaker in a meeting instead of relying on human control, but I never added that feature.
Houseplant soil moisture monitoring system2022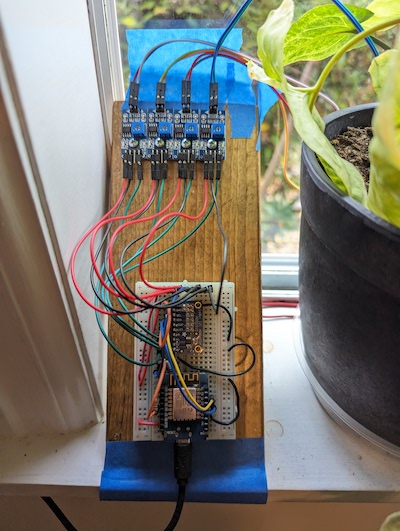
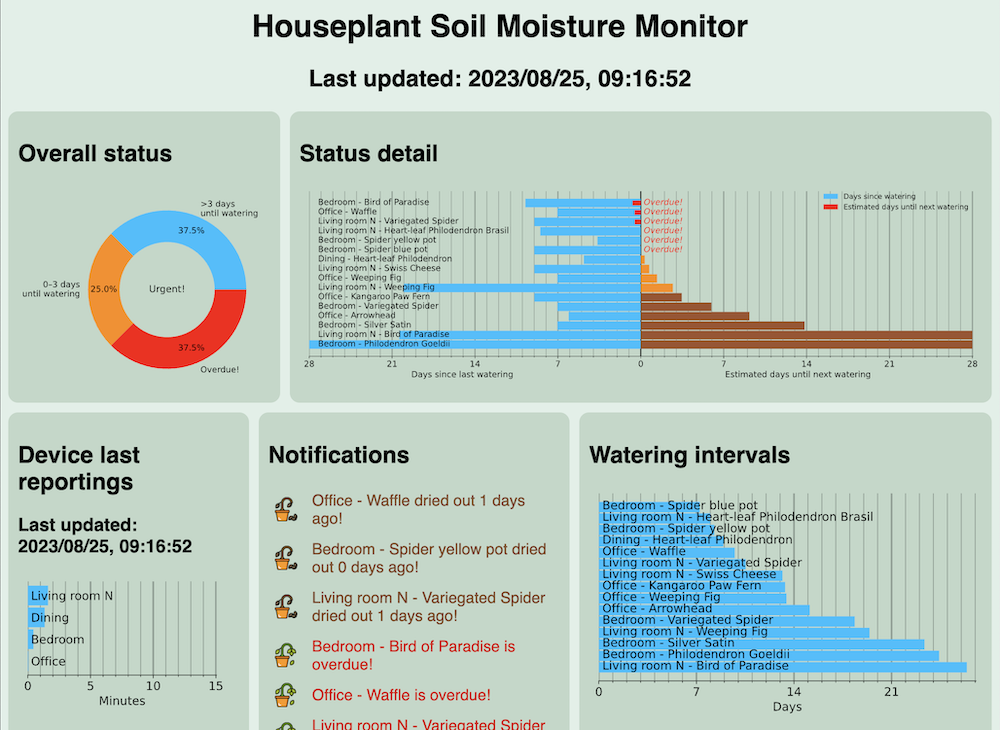
Proceed to houseplant soil moisture monitoring system page I have created and deployed a houseplant soil moisture monitoring system in my house that provides a web dashboard for tracking and analyzing my numerous houseplants. |